ИНСТРУМЕНТАРИЙ МОДЕЛИРОВАНИЯ МУЛЬТИАГЕНТНЫХ СИСТЕМ
В проекте создан инструментарий, позволяющий моделировать работу мультиагентной системы на заданной территории. С помощью этого инструментария можно исследовать работу нескольких агентов, задавая параметры: длину и ширину пространства, количество агентов.
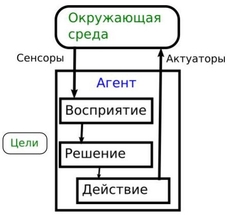
Разработаны: алгоритм самоорганизации агентов, двигающихся на плоскости; виртуальная модель пространства для отладки алгоритма управления. На основе разработанного алгоритма написана программа управления виртуальными роботами в моделируемом пространстве. Результаты моделирования мультиагентных систем подтверждают работоспособность и эффективность разработанного инструментария. Предложенный принцип может быть использован для отладки алгоритмов управления такими роботами, как газонокосилки и пылесосы.
АВТОР ПРОЕКТА
Цыбина Мария. Родилась в 2002 году в городе Москве. С пятого класса учусь в лицее информационных технологий - ЛИТ № 1533.
С раннего детства обучалась программированию. Со второго классах изучала программирование на базе программы "Исполнитель". С третьего класса обучалась программированию с помощью компьютерной игры Colobot. Затем перешла на версию – Ceebot 4. На основе этой программы делала проекты, с которыми участвовала во всевозможных конкурсах и конференциях по программированию, занимая там призовые места.
Сейчас уже второй год программирую в Microsoft Visual Studio на языке C#. Сдала экзамен 98-361 Software Development Fundamentals и получила сертификат Microsoft Technology Associate.
ЗАЩИТА ПРОЕКТА
Проект разрабатывался в 2018-19 учебном году в рамках обучения в инженерном классе лицея информационных технологий - ЛИТ № 1533.
В июне 2019 года была выполнена защита проекта перед экзаменационной комиссией. По итогам защиты проект получил оценку "отлично".
-
Дроны

Мультагентная система управления координирует совместный полет дронов, опрыскивающих сельскохозяйственные площади.
-
Роботы-пылесосы

Мультагентная система управления координирует совместную работу роботов-пылесосов, занятых уборкой офисных помещений.
-
Агро-роботы

Мультагентная система управления координирует совместное движение специальных роботов, обрабатывающих сельскохозяйственные площади.